正規化流
深層生成モデル4
2024-02-14
PyTorch を用いて,正規化流の実装の概要を見る.
A Blog Entry on Bayesian Computation by an Applied Mathematician
$$
$$
import math
import numpy as np
from IPython.display import clear_output
from tqdm import tqdm_notebook as tqdm
import matplotlib as mpl
import matplotlib.pyplot as plt
%matplotlib inline
import seaborn as sns
sns.color_palette("bright")
import matplotlib as mpl
import matplotlib.cm as cm
import torch
from torch import Tensor
from torch import nn
from torch.nn import functional as F
from torch.autograd import Variable
use_cuda = torch.cuda.is_available()まずは ODE ソルバーを用意する.これはどのようなものでも NODE のサブルーチンとして使うことができる.
def ode_solve(z0, t0, t1, f):
"""
Simplest Euler ODE initial value solver
"""
h_max = 0.05
n_steps = math.ceil((abs(t1 - t0)/h_max).max().item())
h = (t1 - t0)/n_steps
t = t0
z = z0
for i_step in range(n_steps):
z = z + h * f(z, t)
t = t + h
return zNODE では,\(D_{x}L_t\) と \(D_\theta L_t\) とは随伴状態 \(a(t)\) に関する ODE で得られる.
この ODE の係数を事前に自動微分を通じて計算しておくための親クラスを定義する:
class ODEF(nn.Module):
def forward_with_grad(self, z, t, grad_outputs):
"""Compute f and a df/dz, a df/dp, a df/dt"""
batch_size = z.shape[0]
out = self.forward(z, t)
a = grad_outputs
adfdz, adfdt, *adfdp = torch.autograd.grad(
(out,), (z, t) + tuple(self.parameters()), grad_outputs=(a),
allow_unused=True, retain_graph=True
)
# grad method automatically sums gradients for batch items, we have to expand them back
if adfdp is not None:
adfdp = torch.cat([p_grad.flatten() for p_grad in adfdp]).unsqueeze(0)
adfdp = adfdp.expand(batch_size, -1) / batch_size
if adfdt is not None:
adfdt = adfdt.expand(batch_size, 1) / batch_size
return out, adfdz, adfdt, adfdp
def flatten_parameters(self):
p_shapes = []
flat_parameters = []
for p in self.parameters():
p_shapes.append(p.size())
flat_parameters.append(p.flatten())
return torch.cat(flat_parameters)Neural ODE では誤差逆伝播の代わりに随伴感度法を用いる.
これは torch.nn.Module を継承したクラスとしては定義できないため,torch.autograd.Function を継承したクラスとして定義する:
class ODEAdjoint(torch.autograd.Function):
@staticmethod
def forward(ctx, z0, t, flat_parameters, func):
assert isinstance(func, ODEF)
bs, *z_shape = z0.size()
time_len = t.size(0)
with torch.no_grad():
z = torch.zeros(time_len, bs, *z_shape).to(z0)
z[0] = z0
for i_t in range(time_len - 1):
z0 = ode_solve(z0, t[i_t], t[i_t+1], func)
z[i_t+1] = z0
ctx.func = func
ctx.save_for_backward(t, z.clone(), flat_parameters)
return z
@staticmethod
def backward(ctx, dLdz):
"""
dLdz shape: time_len, batch_size, *z_shape
"""
func = ctx.func
t, z, flat_parameters = ctx.saved_tensors
time_len, bs, *z_shape = z.size()
n_dim = np.prod(z_shape)
n_params = flat_parameters.size(0)
# Dynamics of augmented system to be calculated backwards in time
def augmented_dynamics(aug_z_i, t_i):
"""
tensors here are temporal slices
t_i - is tensor with size: bs, 1
aug_z_i - is tensor with size: bs, n_dim*2 + n_params + 1
"""
z_i, a = aug_z_i[:, :n_dim], aug_z_i[:, n_dim:2*n_dim] # ignore parameters and time
# Unflatten z and a
z_i = z_i.view(bs, *z_shape)
a = a.view(bs, *z_shape)
with torch.set_grad_enabled(True):
t_i = t_i.detach().requires_grad_(True)
z_i = z_i.detach().requires_grad_(True)
func_eval, adfdz, adfdt, adfdp = func.forward_with_grad(z_i, t_i, grad_outputs=a) # bs, *z_shape
adfdz = adfdz.to(z_i) if adfdz is not None else torch.zeros(bs, *z_shape).to(z_i)
adfdp = adfdp.to(z_i) if adfdp is not None else torch.zeros(bs, n_params).to(z_i)
adfdt = adfdt.to(z_i) if adfdt is not None else torch.zeros(bs, 1).to(z_i)
# Flatten f and adfdz
func_eval = func_eval.view(bs, n_dim)
adfdz = adfdz.view(bs, n_dim)
return torch.cat((func_eval, -adfdz, -adfdp, -adfdt), dim=1)
dLdz = dLdz.view(time_len, bs, n_dim) # flatten dLdz for convenience
with torch.no_grad():
## Create placeholders for output gradients
# Prev computed backwards adjoints to be adjusted by direct gradients
adj_z = torch.zeros(bs, n_dim).to(dLdz)
adj_p = torch.zeros(bs, n_params).to(dLdz)
# In contrast to z and p we need to return gradients for all times
adj_t = torch.zeros(time_len, bs, 1).to(dLdz)
for i_t in range(time_len-1, 0, -1):
z_i = z[i_t]
t_i = t[i_t]
f_i = func(z_i, t_i).view(bs, n_dim)
# Compute direct gradients
dLdz_i = dLdz[i_t]
dLdt_i = torch.bmm(torch.transpose(dLdz_i.unsqueeze(-1), 1, 2), f_i.unsqueeze(-1))[:, 0]
# Adjusting adjoints with direct gradients
adj_z += dLdz_i
adj_t[i_t] = adj_t[i_t] - dLdt_i
# Pack augmented variable
aug_z = torch.cat((z_i.view(bs, n_dim), adj_z, torch.zeros(bs, n_params).to(z), adj_t[i_t]), dim=-1)
# Solve augmented system backwards
aug_ans = ode_solve(aug_z, t_i, t[i_t-1], augmented_dynamics)
# Unpack solved backwards augmented system
adj_z[:] = aug_ans[:, n_dim:2*n_dim]
adj_p[:] += aug_ans[:, 2*n_dim:2*n_dim + n_params]
adj_t[i_t-1] = aug_ans[:, 2*n_dim + n_params:]
del aug_z, aug_ans
## Adjust 0 time adjoint with direct gradients
# Compute direct gradients
dLdz_0 = dLdz[0]
dLdt_0 = torch.bmm(torch.transpose(dLdz_0.unsqueeze(-1), 1, 2), f_i.unsqueeze(-1))[:, 0]
# Adjust adjoints
adj_z += dLdz_0
adj_t[0] = adj_t[0] - dLdt_0
return adj_z.view(bs, *z_shape), adj_t, adj_p, Noneこれを nn.Module クラスとしてラップすることで,準備完了である:
class NeuralODE(nn.Module):
def __init__(self, func):
super(NeuralODE, self).__init__()
assert isinstance(func, ODEF)
self.func = func
def forward(self, z0, t=Tensor([0., 1.]), return_whole_sequence=False):
t = t.to(z0)
z = ODEAdjoint.apply(z0, t, self.func.flatten_parameters(), self.func)
if return_whole_sequence:
return z
else:
return z[-1]簡単な線型ダイナミクスを,線型なダイナミクスで学習する.
class LinearODEF(ODEF):
def __init__(self, W):
super(LinearODEF, self).__init__()
self.lin = nn.Linear(2, 2, bias=False)
self.lin.weight = nn.Parameter(W)
def forward(self, x, t):
return self.lin(x)
class SpiralFunctionExample(LinearODEF):
def __init__(self):
super(SpiralFunctionExample, self).__init__(Tensor([[-0.1, -1.], [1., -0.1]]))
class RandomLinearODEF(LinearODEF):
def __init__(self):
# super(RandomLinearODEF, self).__init__(torch.randn(2, 2)/2.)
super(RandomLinearODEF, self).__init__(Tensor([[0.1, -0.1], [0.1, -0.1]]))
def to_np(x):
return x.detach().cpu().numpy()def plot_trajectories(obs=None, times=None, trajs=None, save=None, figsize=(16, 8)):
plt.figure(figsize=figsize)
if obs is not None:
if times is None:
times = [None] * len(obs)
for o, t in zip(obs, times):
o, t = to_np(o), to_np(t)
for b_i in range(o.shape[1]):
plt.scatter(o[:, b_i, 0], o[:, b_i, 1], c=t[:, b_i, 0], cmap=cm.plasma)
if trajs is not None:
for z in trajs:
z = to_np(z)
plt.plot(z[:, 0, 0], z[:, 0, 1], lw=1.5)
if save is not None:
plt.savefig(save)
plt.show()
def conduct_experiment(ode_true, ode_trained, n_steps, name, plot_freq=10, lr=0.01):
# Create data
z0 = Variable(torch.Tensor([[0.6, 0.3]]))
t_max = 6.29*5
n_points = 200
index_np = np.arange(0, n_points, 1, dtype=np.int64)
index_np = np.hstack([index_np[:, None]])
times_np = np.linspace(0, t_max, num=n_points)
times_np = np.hstack([times_np[:, None]])
times = torch.from_numpy(times_np[:, :, None]).to(z0)
obs = ode_true(z0, times, return_whole_sequence=True).detach()
obs = obs + torch.randn_like(obs) * 0.01
# Get trajectory of random timespan
min_delta_time = 1.0
max_delta_time = 5.0
max_points_num = 32
def create_batch():
t0 = np.random.uniform(0, t_max - max_delta_time)
t1 = t0 + np.random.uniform(min_delta_time, max_delta_time)
idx = sorted(np.random.permutation(index_np[(times_np > t0) & (times_np < t1)])[:max_points_num])
obs_ = obs[idx]
ts_ = times[idx]
return obs_, ts_
# Train Neural ODE
optimizer = torch.optim.Adam(ode_trained.parameters(), lr=lr)
for i in range(n_steps):
obs_, ts_ = create_batch()
z_ = ode_trained(obs_[0], ts_, return_whole_sequence=True)
loss = F.mse_loss(z_, obs_.detach())
optimizer.zero_grad()
loss.backward(retain_graph=True)
optimizer.step()
if i % plot_freq == 0:
z_p = ode_trained(z0, times, return_whole_sequence=True)
plot_trajectories(obs=[obs], times=[times], trajs=[z_p], save=f"Files/{name}/{i//plot_freq}.png")
clear_output(wait=True)ode_true = NeuralODE(SpiralFunctionExample())
ode_trained = NeuralODE(RandomLinearODEF())
conduct_experiment(ode_true, ode_trained, 500, "linear")ImageMagick により git 生成した結果は次の通り:
convert -delay 10 -loop 0 $(for i in {0..49}; do echo $i.png; done) output.gif
今回は非線型のダイナミクスを,ELU を備えた一層のニューラルネットワークで学習する:
class TestODEF(ODEF):
def __init__(self, A, B, x0):
super(TestODEF, self).__init__()
self.A = nn.Linear(2, 2, bias=False)
self.A.weight = nn.Parameter(A)
self.B = nn.Linear(2, 2, bias=False)
self.B.weight = nn.Parameter(B)
self.x0 = nn.Parameter(x0)
def forward(self, x, t):
xTx0 = torch.sum(x*self.x0, dim=1)
dxdt = torch.sigmoid(xTx0) * self.A(x - self.x0) + torch.sigmoid(-xTx0) * self.B(x + self.x0)
return dxdt
class NNODEF(ODEF):
def __init__(self, in_dim, hid_dim, time_invariant=False):
super(NNODEF, self).__init__()
self.time_invariant = time_invariant
if time_invariant:
self.lin1 = nn.Linear(in_dim, hid_dim)
else:
self.lin1 = nn.Linear(in_dim+1, hid_dim)
self.lin2 = nn.Linear(hid_dim, hid_dim)
self.lin3 = nn.Linear(hid_dim, in_dim)
self.elu = nn.ELU(inplace=True)
def forward(self, x, t):
if not self.time_invariant:
x = torch.cat((x, t), dim=-1)
h = self.elu(self.lin1(x))
h = self.elu(self.lin2(h))
out = self.lin3(h)
return outfunc = TestODEF(Tensor([[-0.1, -0.5], [0.5, -0.1]]), Tensor([[0.2, 1.], [-1, 0.2]]), Tensor([[-1., 0.]]))
ode_true = NeuralODE(func)
func = NNODEF(2, 16, time_invariant=True)
ode_trained = NeuralODE(func)
conduct_experiment(ode_true, ode_trained, 3000, "nonlinear", plot_freq=30, lr=0.001)逡巡を繰り返して学習する様子がよく伺える.学習率を lr=0.001 としているが,lr=0.01 でも lr=0.005 でも,学習が非常に良い線まで行ってもすぐに初期値よりもカオスなダイナミクスに戻ってしまう挙動がよく見られた.
Mikhail Surtsukov 氏によるチュートリアルが,このレポジトリで公開されている.
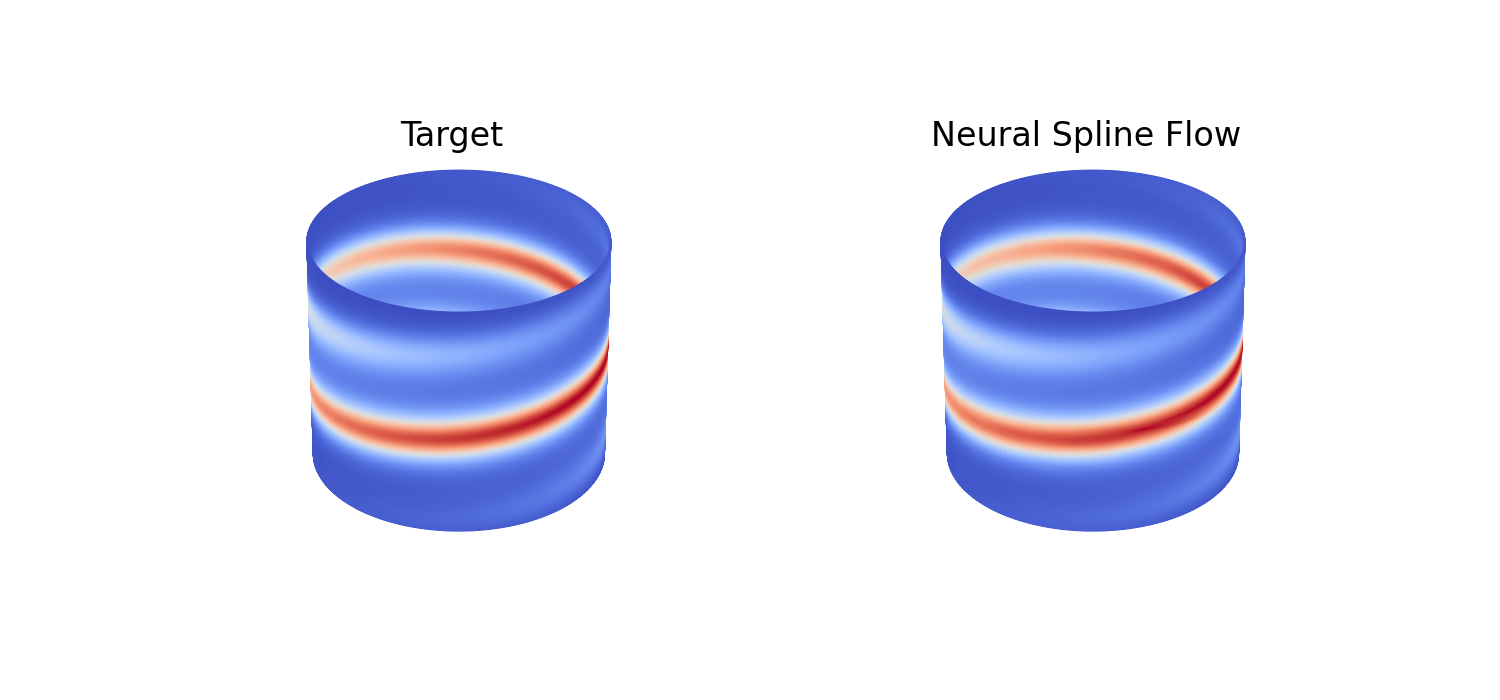
FFJORD (Grathwohl et al., 2019) の実装は,このレポジトリで公開されている.