ベイズ変数選択
BMI データの重線型回帰を題材として
2024-12-10
A Blog Entry on Bayesian Computation by an Applied Mathematician
$$
$$
ベイズ変数選択には多くの方法がある.次の記事を参照:
本記事ではパラメータ推定とベイズ変数選択を同時に行う方法としては State-of-the-art の1つだと思われる Sticky PDMP によるベイズ変数選択を紹介する.
この方法はパラメータを PDMP によりサンプリングすると同時に,そのダイナミクスを活かすことで,パラメータ選択の離散空間上で非可逆なジャンプを達成する.
しかし (3) のようなアトムを持った分布に直接適用できる Sticky PDMP によるアプローチは,2の方法と違って非可逆なモデル間ジャンプを達成する効率的なサンプラーである.
さらにその上,Reversible-Jump MCMC の拡張と見れる通り,特定の部分空間にトラップされていた総時間を計算することで,ベイズ因子を計算せずに事後包含確率 (PIP: Posterior Inclusion Probability) を,1の方法と違って誤差なく計算できるという美点がある.
パラメータ \(x\in\mathbb{R}^d\) 上に spike-and-slab 事前分布 (Mitchell and Beauchamp, 1988) \[ p(dx)=\prod_{i=1}^d\biggr(\omega_ip_i(x_i)\,dx_i+(1-\omega_i)\delta_0(dx_i)\biggl) \tag{1}\] を導入して,ベイズ変数選択を行うとしよう.
このとき,モデルの対数尤度を \(\ell(x):=\log p(y|x)\) とすると,事後分布は \[ p(x|y)\,dx\,\propto\,p(y|x)p(dx)=e^{\ell(x)}\prod_{i=1}^d\biggr(\omega_ip_i(x_i)\,dx_i+(1-\omega_i)\delta_0(dx_i)\biggl) \tag{2}\] と表せる.
そこでこの設定を少し抽象化して,ポテンシャル \(\Psi:\mathbb{R}^d\to\mathbb{R}\) を通じて \[ \mu(dx)=Ce^{-\Psi(x)}\prod_{i=1}^d\left(dx_i+\frac{1}{\kappa_i}\delta_0(dx_i)\right) \tag{3}\] と表せる分布 \(\mu\in\mathcal{P}(\mathbb{R}^d)\) からサンプリングする問題を考える.\(\kappa_i\) が小さいほど \(0\) に大きな重みがかかる.
事後分布 (2) は \[ \kappa_i=\frac{\omega_i}{1-\omega_i}p_i(0)(>0) \] と取った場合にあたる.
この \(\mu\) (3) は Lebesgue 測度に関して絶対連続でないため密度を持たず,通常の勾配を用いた MCMC 法を直接は適用できない.
これは一見 Markov 過程にならないが,状態空間を拡張して \[ E_0:=\mathbb{R}_{0}^d\times\{\pm1\}^d,\qquad\mathbb{R}_{0}:=(-\infty,0^-]\sqcup[0^+,\infty) \] とし,この上の領域 \[ \partial E_i:=\left\{(x,v)\in E_0\mid (x_i,v_i)=(0^-,-1)\text{ or }(0^+,1)\right\},\qquad i\in[d], \] を吸収的だとすると,この \(E_{0}\) 上の Markov 過程になる.
\(\partial E_i\) に入った瞬間にその地点から動かなくなり,\(v_i\) は必ずしも「速さ」を表さなくなる,と解する.代わりに \[ \alpha(x,v):=\left\{i\in[d]\mid(x,v)\notin \partial E_i\right\} \] を「アクティブな座標番号」の全体とする.
すると例えば Julia では alpha::Vector{Bool} として,alpha .* v が真の速度ベクトルとなり,簡単に実装できる.これを数式上は \[
v_\alpha:=1_{\alpha(x,v)}\cdot v
\] で表すこととする.
続いて \(T_i:\partial E_i\to E_0\) を,\(i\) 番目の座標・速度成分 \((x_i,v_i)\) に関して \[ (0^+,-1)\mapsto(0^-,-1),\qquad(0^-,1)\mapsto(0^+,1) \] と変換する写像とする.
Zig-Zag サンプラーは各成分ごとに完全に分離したダイナミクスを持つために,生成作用素も \(\widehat{A}=\sum_{i=1}^d\widehat{A}_i\) と表せる.各 \(\widehat{A}_i\) は \[ \widehat{A}_if(x,v)=1_{\partial E_i^\complement}(x,v)\left(v_i\partial_{x_i}f(x,v)+(v_i\partial_{x_i}\Phi(x))_+\biggr(F_i^*f(x,v)-f(x,v)\biggl)\right) \] \[ +1_{\partial E_i}(x,v)\kappa_i\biggr(T_i^*f(x,v)-f(x,v)\biggl). \] と表せ,定義域は \[ \mathcal{D}(\widehat{A})=\left\{f\in L(E_0)\mid f\circ\varphi(-,x,v)\;\text{は絶対連続で}\;\partial E_i\;\text{上にも連続延長する}\right\} \] となる.
こうして構成された Zig-Zag サンプラーは,分布 \(\mu\) の裾が重すぎない場合,具体的にはある \(c>d,c'\in\mathbb{R}\) が存在して \[ \Psi(x)>c\log\lvert x\rvert-c',\qquad x\in\mathbb{R}^d, \] を満たすとき(全変動ノルムに関して)エルゴード的である (Prop. A.9 Bierkens et al., 2023, p. 20).
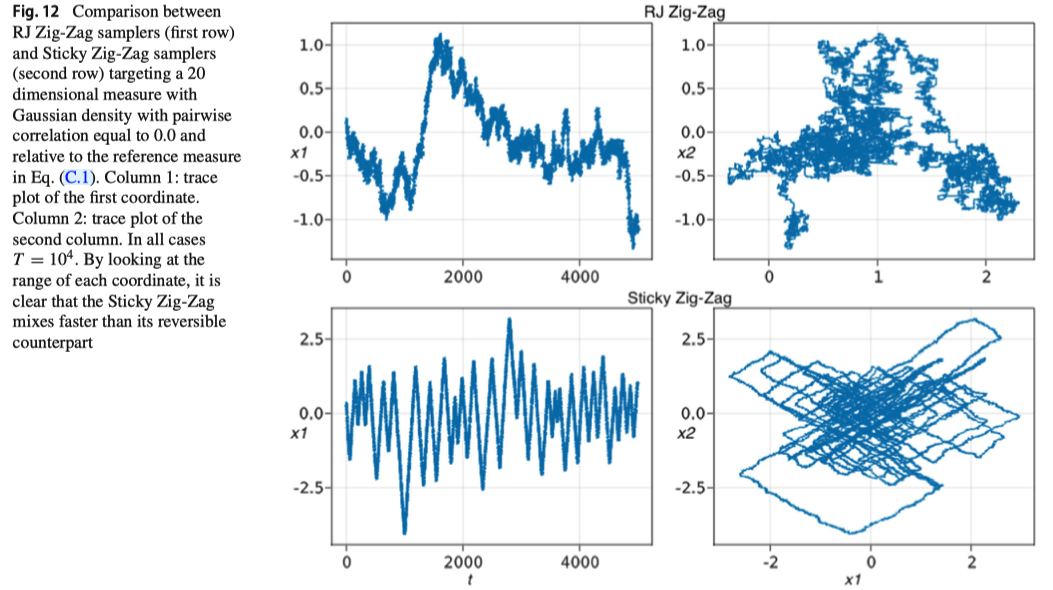
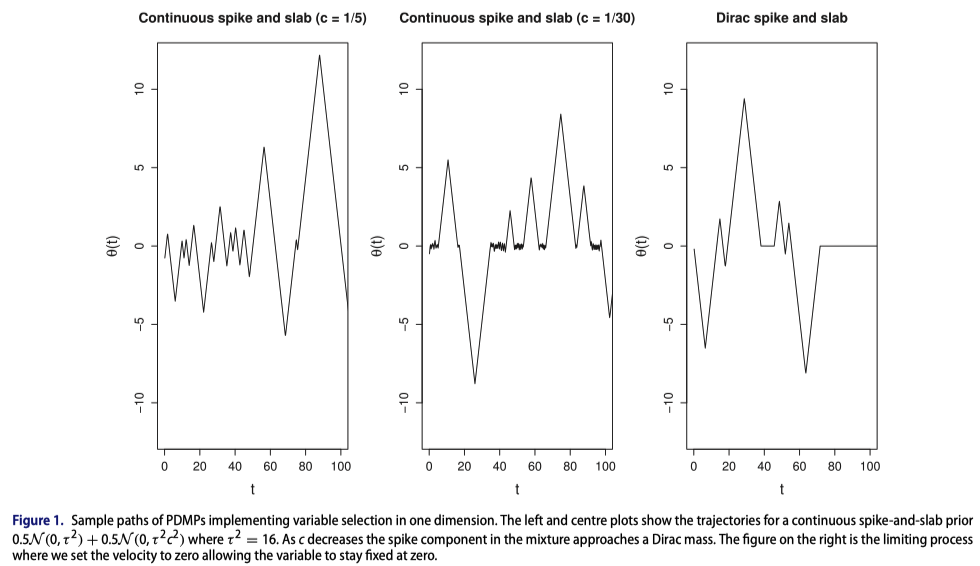
Sticky Zig-Zag サンプラーは,spike-and-slab 事前分布 (1) を,十分小さい標準偏差 \(c_i>0\) を持つ正規分布で近似した \[ \widetilde{p}(dx)=\sum_{i=1}^d\biggr(\omega_ip_i(x_i)\,dx_1+(1-\omega_i)\operatorname{N}(0,c_i^2)\biggl) \] に対する Zig-Zag サンプラーの,\(c_i\to0\) の極限の場合と見れる (Chevallier et al., 2023, p. 2917).
一般に2つの空間 \(E_i,E_j\) の間のジャンプをデザインするとする.
任意に部分集合 \(\Gamma_{i,j}\subset E_i\) を定めて,ここを通過する度に確率 \(p_{i,j}>0\) でジャンプするとすると,ここから戻る Poisson レート \(\beta_{i,j}:E_j\to\mathbb{R}_+\) は \[ \beta_{i,j}(z):=p_{i,j}\frac{}{} \]
Sticky Zig-Zag サンプラーは筆者の開発したパッケージ PDMPFlux.jl に実装されている.詳細は次も参照: